GlassKnees
Well-Known Member
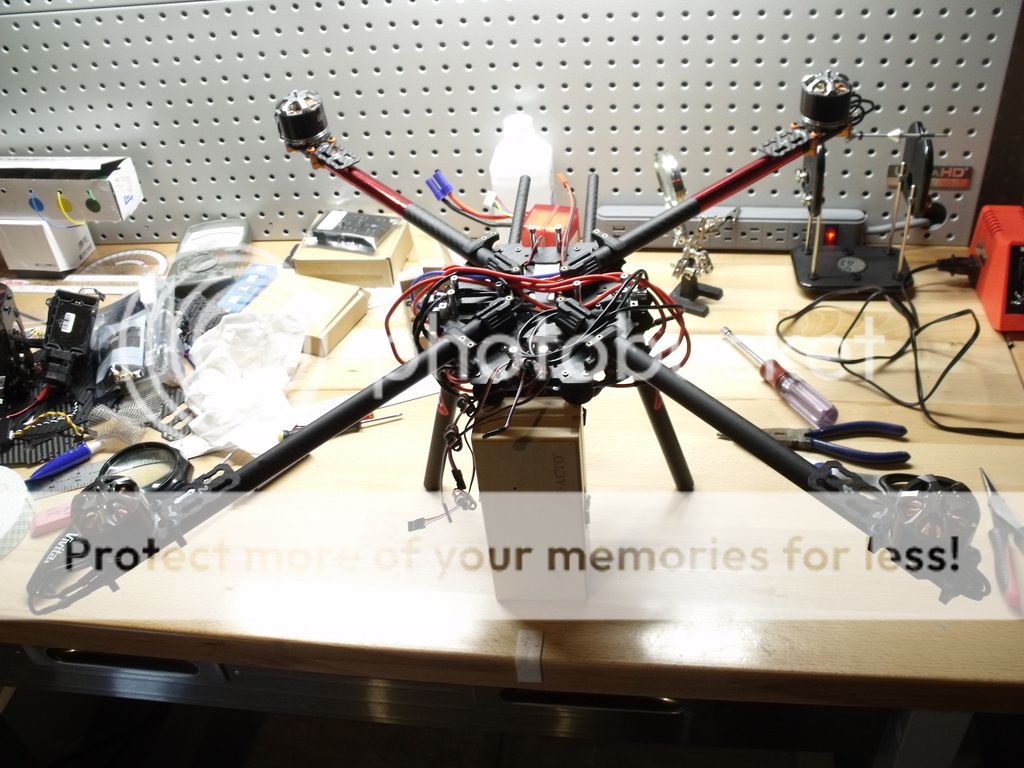
Well, first flight ended in failure. After arming, I started to advance the throttle and the aircraft immediately toppled onto its left side and spun around clockwise - looked to me like loss of power on the #3 motor (front left).
The aircraft remained upright and smoke started coming from the aircraft. I immediately thought that the lipo was damaged so I quickly unplugged the battery and removed it, but the smoke was coming from the chassis.
After taking it home, I removed the basswood bridge I made to protect the ESCs from the lipo and discovered that the ESC powering the #3 motor was burned up.
I just removed the top chassis plate to access the wiring underneath and made a discovery - the servo wires to the #3 ESC were pinched to the point of exposing bare wires. Perhaps this is the cause of the ESC failure?
I created a video, but updated it to show my latest finding:
The aircraft remained upright and smoke started coming from the aircraft. I immediately thought that the lipo was damaged so I quickly unplugged the battery and removed it, but the smoke was coming from the chassis.
After taking it home, I removed the basswood bridge I made to protect the ESCs from the lipo and discovered that the ESC powering the #3 motor was burned up.
I just removed the top chassis plate to access the wiring underneath and made a discovery - the servo wires to the #3 ESC were pinched to the point of exposing bare wires. Perhaps this is the cause of the ESC failure?
I created a video, but updated it to show my latest finding:
Last edited: