wafflejock
Well-Known Member
I don't fully getb the TX, RX SDA, CLK, SCL things. Think the TX and RX is the signals, the numbers next to these the UART numbers, CLK and SDA might be the compass...SCL...is that the same as CLK? Confusing. Anyway, I need help! Thanks in advance!
Again haven't hooked up gps but I can shed light on some of those abbreviations.
TX = transmit signals come out of this port
RX = receive, expects a signal to come into this port (usually hooked to tx or some other device)
Basically one TX/RX pair makes for two way "duplex" (simultaneous) communication. Typically these are considered a UART
SDA = Serial data
SCL/CLK = Clock a pulse or shared clock beat between devices this way baud rate basically doesn't need to be known up front and one oscillator/clock signal is shared between devices
Believe SDA/SCL is usually for I2C or "I squared C" bus, two wire communication between a chain of devices. Usually any device on the I2C will have some predefined address so many devices can share the same SDA and SCL connections for synched clock and data and the addresses allow devices to respond to data only relevant to them.
I think you only need one or the other (I2C or UART) generally but might be the case that GPS module uses one protocol and the compass uses another or some other redundancy but just guessing.
One thing that is confusing is generally want a TX going to a RX and an RX going to a TX when using UART connections.




 curious to know how it works out in practice too let us know.
curious to know how it works out in practice too let us know.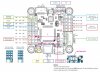


") !!
!!