PCR
Well-Known Member
Well it arrived, I am pretty please. Looks like quality construction, is a composite construction, upper and lower layer of frame seem to sandwich another material, very light and very stiff. The props are a bit flimsy, they did send two sets but I will probably replace pretty quickly, they are 5 inch.
Some connection issue that will need to be dealt with once I get a transmitter and receiver.
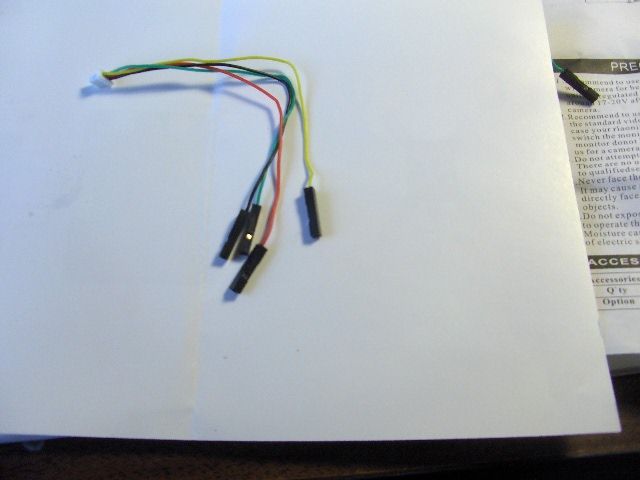
Diagram shows three wires (white, red, and black) in a single connector going to throttle, blue for roll, yellow for pitch, green for yaw, and orange for flight mode.
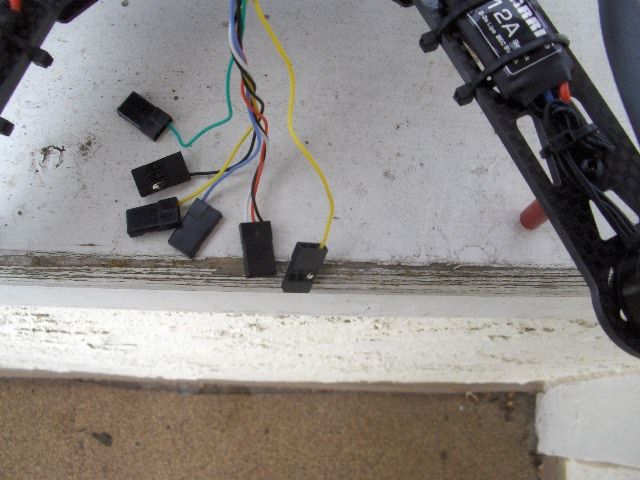
Not sure what flight mode is , but the wire are black, yellow, blue, and green (together) another yellow separate?? See Pic
Also a yellow wire that goes from the controller to the camera, probably to activate the camera? Shown near battery connection.
Also got two other little connectors.



Some connection issue that will need to be dealt with once I get a transmitter and receiver.
Diagram shows three wires (white, red, and black) in a single connector going to throttle, blue for roll, yellow for pitch, green for yaw, and orange for flight mode.
Not sure what flight mode is , but the wire are black, yellow, blue, and green (together) another yellow separate?? See Pic
Also a yellow wire that goes from the controller to the camera, probably to activate the camera? Shown near battery connection.
Also got two other little connectors.

")