Hi Forum!
I am brand new to this forum, as well as building quads.
For the past week, I have been constructing a full-sized quad with the following specs:
What has been happening, is when I exit the idle/arm mode and begin to accelerate, the copter flips. The first maiden I did, it flipped every time (later realizing that the props were on wrong).
Later, I fixed the props, and it still flips.
Also, when I push the pitch gimbal forward on my transmitter, the copters motors would make it push the opposite way.
Anyway, I realized that one of the motors seems underpowered, as it takes more time to spool up to speed; compared to the others.
Now it flips into the direction into the underpowered boom (presumably because it is off balanced).
I did calibrate the ESCs by powering them up with the throttle stick all the way up, then bring it down and wait for the beeps.
Any help would be appreciated!
I will attach some photos and videos in a little bit.
I am brand new to this forum, as well as building quads.
For the past week, I have been constructing a full-sized quad with the following specs:
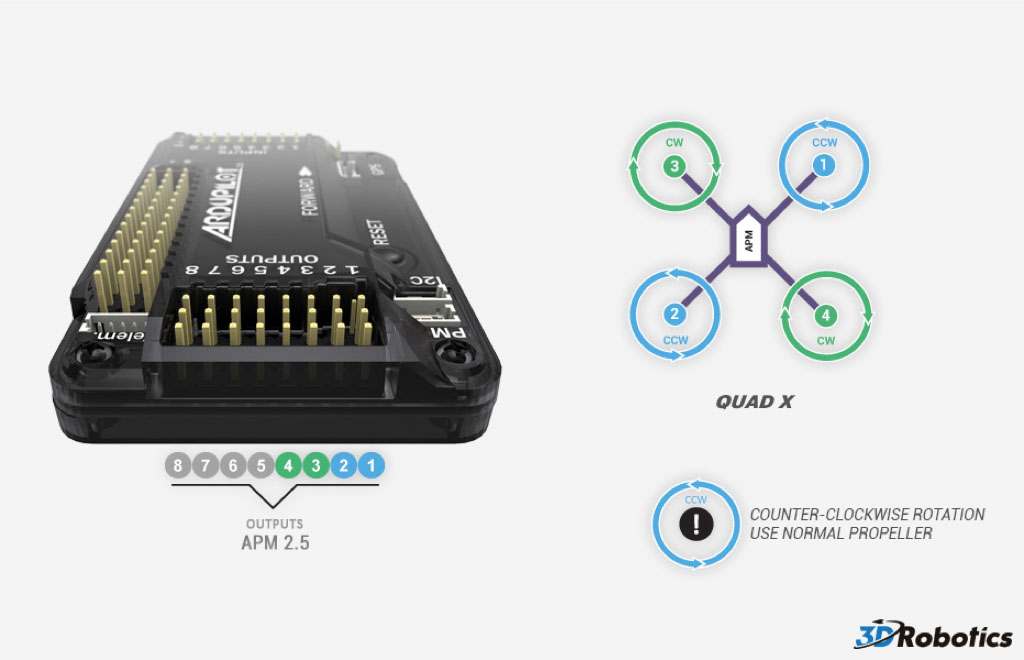
- APM 2.6 Controller (bought of eBay)
- 4 x 1000 kv brushless motors
- 4 x 30A XT-XINTE ESC
- 2200 mAh 3S battery
- 4 x 10X4.5 props or 80x45 props
- FS-t6 tx and rx
What has been happening, is when I exit the idle/arm mode and begin to accelerate, the copter flips. The first maiden I did, it flipped every time (later realizing that the props were on wrong).
Later, I fixed the props, and it still flips.
Also, when I push the pitch gimbal forward on my transmitter, the copters motors would make it push the opposite way.
Anyway, I realized that one of the motors seems underpowered, as it takes more time to spool up to speed; compared to the others.
Now it flips into the direction into the underpowered boom (presumably because it is off balanced).
I did calibrate the ESCs by powering them up with the throttle stick all the way up, then bring it down and wait for the beeps.
Any help would be appreciated!
I will attach some photos and videos in a little bit.