james howson
Member
i lossesned the nuts, did the world of ggod, it actuaklly took off without tiopping backwardfs, just still abit wobbbly aftyerwards
yeah they are wired up cause i had a test flight and it flew up then just wobbled and fellone other thing? do you have your motors wired up correctly? it looks like it fighting itself a bit.
also i got it just to go straigh up, then it just roledr to the right and crashedone other thing? do you have your motors wired up correctly? it looks like it fighting itself a bit.
it a straight up all the motors will match about the same speed. to stabilize it will speed up and slow down motors. you rather have a PID issue now and need to lower or raise or you have 2 motors swapped.also i got it just to go straigh up, then it just roledr to the right and crashed


no tyet mate! think im close to be homnestDid you get it figured out James? My curiosity is getting the better of me
thanks buddy, will try that now!!Check your motors and props, if that is not the problem then your P gain is WAY too high. To adjust set I and D to 0, then adjust down untill you don't have ocilations. Be sure to power cycle the quad every time you make an adjustment or two as the I gain is determined over time.
Once you get the P gain turned down until there are no oscillations then turn the I gain up until you get slow speed oscillation, then nudge it back down until you are good. If it is too high you will get slow speed oscillations, if it is too low you will get slow drifting over time that gets worse.
if you have D do it the same, too high then dial it back down, you have to adjust in that order P>I>D.
If not PIDs then is likely your motor orientation in your settings, the motors are plugged in the wrong order, or props are on wrong.
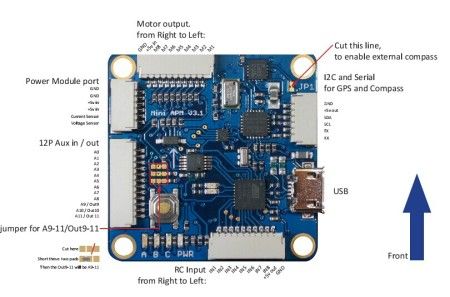
Motor orientation, note that it is different than most quads.
CW ==== CCW
3 1
CCW ====CW
1 4
Plug them in from right to left
i managed to get it to take off, but it loves to lean back and crash, and its also not consitent, it will be stable one time then the next it will be wobblyCheck your motors and props, if that is not the problem then your P gain is WAY too high. To adjust set I and D to 0, then adjust down untill you don't have ocilations. Be sure to power cycle the quad every time you make an adjustment or two as the I gain is determined over time.
Once you get the P gain turned down until there are no oscillations then turn the I gain up until you get slow speed oscillation, then nudge it back down until you are good. If it is too high you will get slow speed oscillations, if it is too low you will get slow drifting over time that gets worse.
if you have D do it the same, too high then dial it back down, you have to adjust in that order P>I>D.
If not PIDs then is likely your motor orientation in your settings, the motors are plugged in the wrong order, or props are on wrong.
Motor orientation, note that it is different than most quads.
CW ==== CCW
3 1
CCW ====CW
1 4
Plug them in from right to left
Sounds like I gain, maybe too low.i managed to get it to take off, but it loves to lean back and crash, and its also not consitent, it will be stable one time then the next it will be wobbly
i gain of pitch? or what?Sounds like I gain, maybe too low.
Does your FCB use derivative? (PI(D))
I gain of the Axis that is giving you problems, if you have a square quad your roll and pitch should be linked.i gain of pitch? or what?
and yes it does