Multinoob
New Member
Hi there guys. I'm a noob in this whole quadcopter generation. I live in South Africa and help this side is hard to come by as they changed the rule about quads in this country. This is why i am looking abroad.
Parts i purchased from Hobbyking
1)H-King Orca 280mm FPV Ready Quad Copter Frame
2)Quanum MT Series 1806 2300KV Brushless Multirotor Motor Built by DYS
3)Afro ESC 12Amp OPTO Ultra Lite Multi-rotor Motor Speed Controller (SimonK Firmware) Version 3
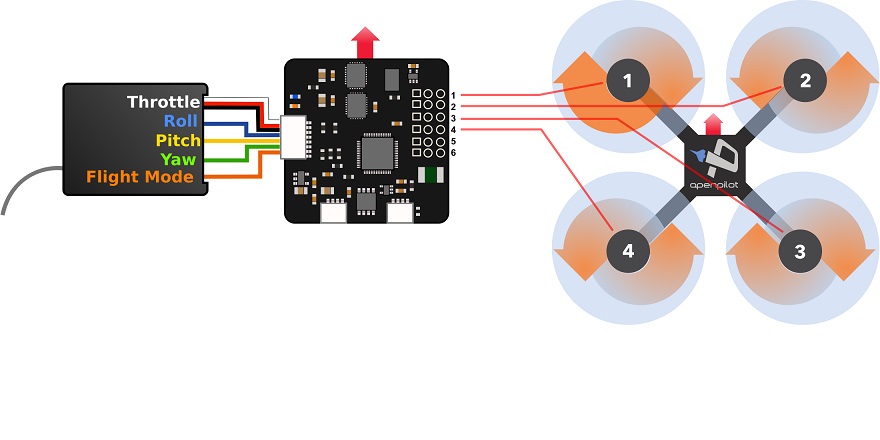
5)CC3D Controller
6)Turnigy TGY-i6 AFHDS Transmitter and 6CH Receiver (Mode 2)
7)6030 Carbon Fiber Propellers CW and CCW Rotation (1 pair)
8)Tunigy 2200 Lipo 35C
I have set up everything and did the open pilot calibration but when i try to lift of the quad is very unstable( maybe 2 inches from the ground) then after about 2-5 seconds the motors speeds up and flips. Every time. Sounds like a massive vibration from motors or some of them. Any ideas??? Will see if i can upload a picture and video later.
Parts i purchased from Hobbyking
1)H-King Orca 280mm FPV Ready Quad Copter Frame
2)Quanum MT Series 1806 2300KV Brushless Multirotor Motor Built by DYS
3)Afro ESC 12Amp OPTO Ultra Lite Multi-rotor Motor Speed Controller (SimonK Firmware) Version 3
5)CC3D Controller
6)Turnigy TGY-i6 AFHDS Transmitter and 6CH Receiver (Mode 2)
7)6030 Carbon Fiber Propellers CW and CCW Rotation (1 pair)
8)Tunigy 2200 Lipo 35C
I have set up everything and did the open pilot calibration but when i try to lift of the quad is very unstable( maybe 2 inches from the ground) then after about 2-5 seconds the motors speeds up and flips. Every time. Sounds like a massive vibration from motors or some of them. Any ideas??? Will see if i can upload a picture and video later.