
GlassKnees
Well-Known Member
It is hard for me to believe that it was about two years ago when I decided to take the leap and begin learning to fly and build multicopters. It began when I bought a little Hubsan X4 and read the book "Build Your Own Quadcopter", which basically was a pitch for buying an Elev-8 quadcopter from Parallax, a robotics company out in California. The Elev-8 kit cost $500, and in addition to that, you had to buy an R/C transmitter and receiver and a lipo battery (as well as some tools if you didn't already have them).
So I took the plunge ordered a Spektrum DX8 tranmitter, 6 channel receiver and the Elev-8 kit. It didn't take long before I had completed it:

I had flown my little Hubsan so I had some flight experience; I soon found that my Elev-8 flew pretty much the same - just a bigger version. It didn't take long after a few practice flights, that I got overconfident and let the aircraft get away from me - losing orientation, etc. But the aircraft was easy to repair.
The Hoverfly flight controller was pretty basic - it offered only one flight mode, acro, and with no GPS or compass, there were no features such as RTL (Return To Launch), that you could use if you let the aircraft get too far or high. It didn't take long before I longed for a quadcopter with some advance flight modes to aid me in my flight training. One day, I watched a YouTube video from the FliteTest guys - they showcased the APM flight controller from 3DR. I decided that I had to have one!
So I bought a second kit from Parallax, but this time I selected a kit without the flight controller, and I ordered an APM F.C. as well as GPS/compass, a pair of telemetry transceivers and the APM power module.
I chose to build a second quadcopter mainly because the APM F.C. assumes a different ordering of motors than the Hoverfly, and I didn't want to break down my quad and rebuild it. Soon, I had a second aircraft:

Ah, but the APM is like the Linux operating system - lots of functionality, but the price is lots of complexity too. I inadvertently changed the compass orientation setting to the wrong value and when I took the APM ship out to the field for a test flight and switched to Loiter mode, it flew away! I tried to switch back to Stabilize mode and coax it back but it was too far and too high. I switched to RTL, which of course didn't work, and watched it disappear.
Some weeks later, I recovered it when a person living downrange posted a note in a local message board that a drone had crashed in his backyard. It was a mess when I got it back. But after a few weeks I repaired it and after being careful to review the parameters, I was happy to have a quadcopter that had all the features I wanted, including the ability to fly autonomously!
But later I decided I wanted to take aerial videos. So I mounted a sport camera that I used on bike rides on one of my copters:

It sorta worked okay, but since the camera was fixed to the aircraft, I had to fly under really calm conditions, otherwise you would get seasick watching my videos! So, my next step was to buy and install a gimbal.
I learned on the Parallax online forum that some guy had fabricated a mount for a gimbal using a piece of U-channel aluminum stock. So I followed his instructions:

I got some nice stabilized video, but the added weight put quite a strain on the motors. In the meantime, I had also built a hexcopter - a Tarot FY680 Pro and used Tarot 4006 motors. I decided to buy some of those motors and put them on to see if I could get better flight endurance.

The aircraft flew well, but alas, I only got about 6 min of flight time, using a 6000 mAh 4S lipo. To make matters worse, the aircraft had gotten heavier - GPS, telemetry transceiver, video transmitter, Gimbal, GoPro camera, heavier motor mounts and motors....
After doing some research, I soon realized that I couldn't expect to get much better flight endurance given the weight (5lbs) of the copter and the battery capacity. I could either increase the battery capacity or try to lighten the aircraft. Adding battery capacity didn't work as the additional weight was too much for the motors, which overheated. I couldn't see any way to make the aircraft lighter without doing a major rebuild, so I began searching for more powerful motors.
During my research, I discovered the specs for the new DJI Matrice 200, a quadcopter that weighs close to my Elev-8. I found that DJI was using T-Motors, and I zeroed in on the Navigator series MN3515 motor. From the power chart supplied by T-Motor, this seemed like a solution, but the price was $98 per motor! While shopping around, I discovered another T-Motor on Amazon, someone was selling seven MN3520 motors for the unheard of price of $46 - these are $110 motors!
I had recently gotten burned buying something from Amazon, so I was suspicious, but after contacting the seller, he simply had these motors in stock and weren't selling, so he heavily discounted them in order to get rid of them. So I bought them.
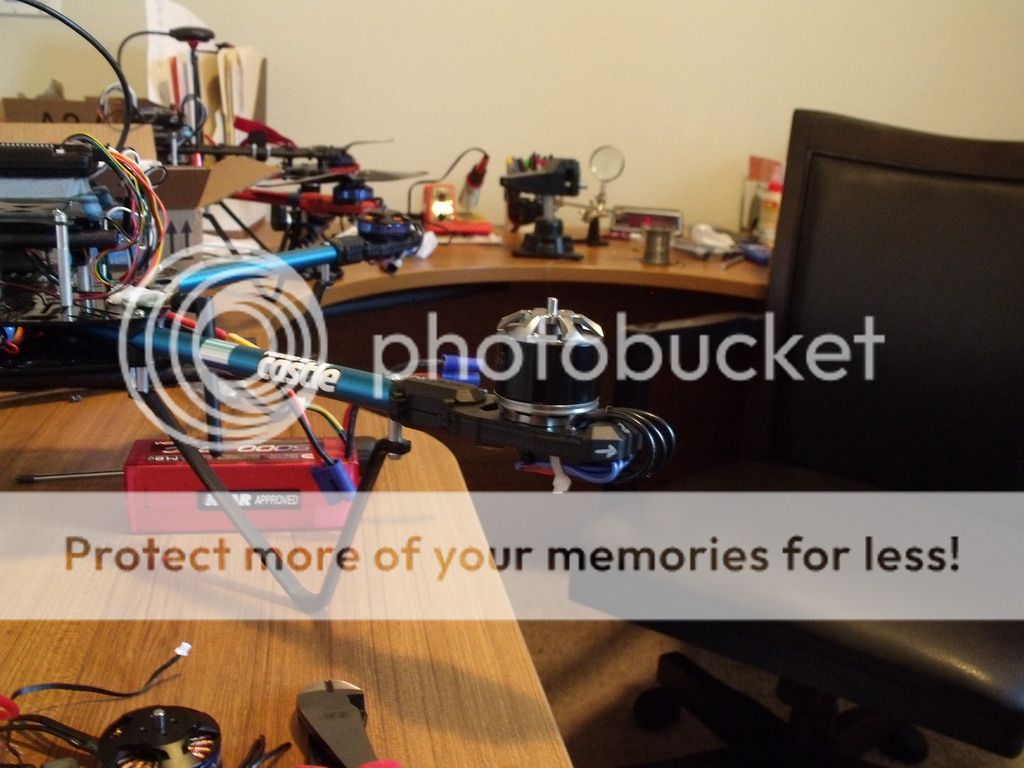
These motors are monsters! In addition, I have to move up from 4S to 6S lipos... More power comes at a price - more weight. But if the charts are correct, I can expect close to 20 minutes endurance if I'm light on the throttle. I have installed them on one Elev-8. In the picture below, you can see one motor installed and you can see the Tarot motor in the background:
I have a third Elev-8 that I built from spare parts and stuff I ordered to complete the build - I call it my Frankenstein quad. It too has the Tarot motors, but will replace them with the Tiger Motors. Frankenstein also has a Feiyu-tech Mini 3D gimbal with a Yi 4K camera installed. It also has a small 3S lipo for powering the gimbal and video transmitter. Here is a picture of my two video platforms:

In a few days, I will be able to test fly the aircraft with the new T-Motors. If all goes well, Frankenstein will get the new motors.
Here is a picture of the motors I've mounted on my Elev-8 airframes:

So I took the plunge ordered a Spektrum DX8 tranmitter, 6 channel receiver and the Elev-8 kit. It didn't take long before I had completed it:
I had flown my little Hubsan so I had some flight experience; I soon found that my Elev-8 flew pretty much the same - just a bigger version. It didn't take long after a few practice flights, that I got overconfident and let the aircraft get away from me - losing orientation, etc. But the aircraft was easy to repair.
The Hoverfly flight controller was pretty basic - it offered only one flight mode, acro, and with no GPS or compass, there were no features such as RTL (Return To Launch), that you could use if you let the aircraft get too far or high. It didn't take long before I longed for a quadcopter with some advance flight modes to aid me in my flight training. One day, I watched a YouTube video from the FliteTest guys - they showcased the APM flight controller from 3DR. I decided that I had to have one!
So I bought a second kit from Parallax, but this time I selected a kit without the flight controller, and I ordered an APM F.C. as well as GPS/compass, a pair of telemetry transceivers and the APM power module.
I chose to build a second quadcopter mainly because the APM F.C. assumes a different ordering of motors than the Hoverfly, and I didn't want to break down my quad and rebuild it. Soon, I had a second aircraft:
Ah, but the APM is like the Linux operating system - lots of functionality, but the price is lots of complexity too. I inadvertently changed the compass orientation setting to the wrong value and when I took the APM ship out to the field for a test flight and switched to Loiter mode, it flew away! I tried to switch back to Stabilize mode and coax it back but it was too far and too high. I switched to RTL, which of course didn't work, and watched it disappear.
Some weeks later, I recovered it when a person living downrange posted a note in a local message board that a drone had crashed in his backyard. It was a mess when I got it back. But after a few weeks I repaired it and after being careful to review the parameters, I was happy to have a quadcopter that had all the features I wanted, including the ability to fly autonomously!
But later I decided I wanted to take aerial videos. So I mounted a sport camera that I used on bike rides on one of my copters:
It sorta worked okay, but since the camera was fixed to the aircraft, I had to fly under really calm conditions, otherwise you would get seasick watching my videos! So, my next step was to buy and install a gimbal.
I learned on the Parallax online forum that some guy had fabricated a mount for a gimbal using a piece of U-channel aluminum stock. So I followed his instructions:
I got some nice stabilized video, but the added weight put quite a strain on the motors. In the meantime, I had also built a hexcopter - a Tarot FY680 Pro and used Tarot 4006 motors. I decided to buy some of those motors and put them on to see if I could get better flight endurance.
The aircraft flew well, but alas, I only got about 6 min of flight time, using a 6000 mAh 4S lipo. To make matters worse, the aircraft had gotten heavier - GPS, telemetry transceiver, video transmitter, Gimbal, GoPro camera, heavier motor mounts and motors....
After doing some research, I soon realized that I couldn't expect to get much better flight endurance given the weight (5lbs) of the copter and the battery capacity. I could either increase the battery capacity or try to lighten the aircraft. Adding battery capacity didn't work as the additional weight was too much for the motors, which overheated. I couldn't see any way to make the aircraft lighter without doing a major rebuild, so I began searching for more powerful motors.
During my research, I discovered the specs for the new DJI Matrice 200, a quadcopter that weighs close to my Elev-8. I found that DJI was using T-Motors, and I zeroed in on the Navigator series MN3515 motor. From the power chart supplied by T-Motor, this seemed like a solution, but the price was $98 per motor! While shopping around, I discovered another T-Motor on Amazon, someone was selling seven MN3520 motors for the unheard of price of $46 - these are $110 motors!
I had recently gotten burned buying something from Amazon, so I was suspicious, but after contacting the seller, he simply had these motors in stock and weren't selling, so he heavily discounted them in order to get rid of them. So I bought them.
These motors are monsters! In addition, I have to move up from 4S to 6S lipos... More power comes at a price - more weight. But if the charts are correct, I can expect close to 20 minutes endurance if I'm light on the throttle. I have installed them on one Elev-8. In the picture below, you can see one motor installed and you can see the Tarot motor in the background:
I have a third Elev-8 that I built from spare parts and stuff I ordered to complete the build - I call it my Frankenstein quad. It too has the Tarot motors, but will replace them with the Tiger Motors. Frankenstein also has a Feiyu-tech Mini 3D gimbal with a Yi 4K camera installed. It also has a small 3S lipo for powering the gimbal and video transmitter. Here is a picture of my two video platforms:
In a few days, I will be able to test fly the aircraft with the new T-Motors. If all goes well, Frankenstein will get the new motors.
Here is a picture of the motors I've mounted on my Elev-8 airframes:
")