Some background information: I am currently trying to finish up a qaudcopter for school in a week or so and so far, i have my frame and controllers done and now i need to connect the ESC's and the flight controller. My cntroler is made from an arduino and some potentiometers with and Xbee shield for comunication. The receiving end is an arduino with an xbee as well. I am wondering if anyone here knows how to connect the arduino (receiving one) to the naze 32 so that it can receive the inputs from my controller that i made and then control the motors while also having the flight controllr connected. I don't know how to hook it up to the Naze so that would be useful to know thx.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Arduino and Naze32 Quadcopter
- Thread starter Totomyl
- Start date
You might wish to better explain what you are trying to accomplish for more help.Some background information: I am currently trying to finish up a qaudcopter for school in a week or so and so far, i have my frame and controllers done and now i need to connect the ESC's and the flight controller. My cntroler is made from an arduino and some potentiometers with and Xbee shield for comunication. The receiving end is an arduino with an xbee as well. I am wondering if anyone here knows how to connect the arduino (receiving one) to the naze 32 so that it can receive the inputs from my controller that i made and then control the motors while also having the flight controllr connected. I don't know how to hook it up to the Naze so that would be useful to know thx.
From what I gather this is relevent info:
Servo library and servo cables to the receiver in if it uses PWM for the receiver input.
Different method if the receiver has CPPM out and the FCB has CPPM out. PWM would be the easiest.
Combined PPM (CPPM) Receiver Library for Arduino if that is the case
https://github.com/claymation/CPPM
https://github.com/adafruit/Adafruit-PWM-Servo-Driver-Library
Servo library can handle PWM for you but the links may help regardless.
okay, sorry for the bad info. lemme try this again for anyone else who has information on my problem xD.
So What i don't understand is what pins would i need to hook up from the naze32 and the arduino together to in order for me to send my motor control signals through to the motors.
I have and arduino on the ground wired with some potentiometers for my controller and it uses an xbee as the radio transmitter. on the other end i have a receiving arduino that also has an xbee.
So normally, to control the motors i could wire the receiving arduino to the motors and get them spinning, but that doesn't help much with flying since it would be very hard to control it.
I want to wire the arduino to the naze and then to the motors. From what i know the esc's go on the one ESC rail with the 5v and gnd correct? And then the esc's to the motor. But then where would i hook up the arduino, what pins do i use if the ESC is connected to the Naze already? I am also confused about how i would use the data from the serial monitor of the (receiving arduino) and then output it to the naze, do i just output the signals that i would normally use to control the motors into the 4 of the 8 pwm pins on the naze?
sorry if my questions seem repetitive or dumb, i am quite new to this but i wanted to give it a shot.
So What i don't understand is what pins would i need to hook up from the naze32 and the arduino together to in order for me to send my motor control signals through to the motors.
I have and arduino on the ground wired with some potentiometers for my controller and it uses an xbee as the radio transmitter. on the other end i have a receiving arduino that also has an xbee.
So normally, to control the motors i could wire the receiving arduino to the motors and get them spinning, but that doesn't help much with flying since it would be very hard to control it.
I want to wire the arduino to the naze and then to the motors. From what i know the esc's go on the one ESC rail with the 5v and gnd correct? And then the esc's to the motor. But then where would i hook up the arduino, what pins do i use if the ESC is connected to the Naze already? I am also confused about how i would use the data from the serial monitor of the (receiving arduino) and then output it to the naze, do i just output the signals that i would normally use to control the motors into the 4 of the 8 pwm pins on the naze?
sorry if my questions seem repetitive or dumb, i am quite new to this but i wanted to give it a shot.
If you want to control the motors individually directly from the PWM signal wire (generally the white wire), however you'll never get a stabilization achieved if your project is due in the next 9 months. For this reason using the Naze to do stabilization is a great idea.okay, sorry for the bad info. lemme try this again for anyone else who has information on my problem xD.
So What i don't understand is what pins would i need to hook up from the naze32 and the arduino together to in order for me to send my motor control signals through to the motors.
I have and arduino on the ground wired with some potentiometers for my controller and it uses an xbee as the radio transmitter. on the other end i have a receiving arduino that also has an xbee.
So normally, to control the motors i could wire the receiving arduino to the motors and get them spinning, but that doesn't help much with flying since it would be very hard to control it.
I want to wire the arduino to the naze and then to the motors. From what i know the esc's go on the one ESC rail with the 5v and gnd correct? And then the esc's to the motor. But then where would i hook up the arduino, what pins do i use if the ESC is connected to the Naze already? I am also confused about how i would use the data from the serial monitor of the (receiving arduino) and then output it to the naze, do i just output the signals that i would normally use to control the motors into the 4 of the 8 pwm pins on the naze?
sorry if my questions seem repetitive or dumb, i am quite new to this but i wanted to give it a shot.
I suggest you first get it flying with the Naze then place the arduino in between if that is what you are wanting to do. You would want a passthrough mode and a mode where the Naze modifies the signal to accomplish whatever you want whether it be sonar for maintaining lower height well or some sort of obstacle avoidance.
If you want to control the motors individually directly from the PWM signal wire (generally the white wire), however you'll never get a stabilization achieved if your project is due in the next 9 months. For this reason using the Naze to do stabilization is a great idea.
I suggest you put the arduino in between the receiver and naze. First get it flying with the Naze then place the arduino in between. You want a passthrough mode and a mode where the Naze modifies the signal to accomplish whatever you want whether it be sonar for maintaining lower height well or some sort of obstacle avoidance.
to get it flying with the naze only, how would i be reading the inputs sent from the sending arduino (controller)? since it sends ASCII values read from the potentiometers through to the serial monitor and then is decoded in the receiving arduino then the arduino categorizes that value into whatever pin to output to.
So if i were to send for example a value of 1024 to all of the motors to get max thrust, would i send it through the pwm pins on the Naze and then it would correct those values for me?
Are you using a transmitter? Also are you using an actual receiver? Probably need links.to get it flying with the naze only, how would i be reading the inputs sent from the sending arduino (controller)? since it sends ASCII values read from the potentiometers through to the serial monitor and then is decoded in the receiving arduino then the arduino categorizes that value into whatever pin to output to.
So if i were to send for example a value of 1024 to all of the motors to get max thrust, would i send it through the pwm pins on the Naze and then it would correct those values for me?
https://www.arduino.cc/en/Main/ArduinoXbeeShieldAre you using a transmitter? Also are you using an actual receiver? Probably need links.
https://www.sparkfun.com/pages/xbee_guide
http://www.digikey.com/catalog/en/partgroup/a000007-and-a000021-xbee-shield-evaluation-boards/15692
not an actual receiver for quads, the reason i am using this is because we are not allowed to use actual receivers
in that case this is going to be really "interesting" hahahaha.
the receiver should plug in to the CPPM in and you might draw your power from the 5v+ and ground on the ESC's power bus.
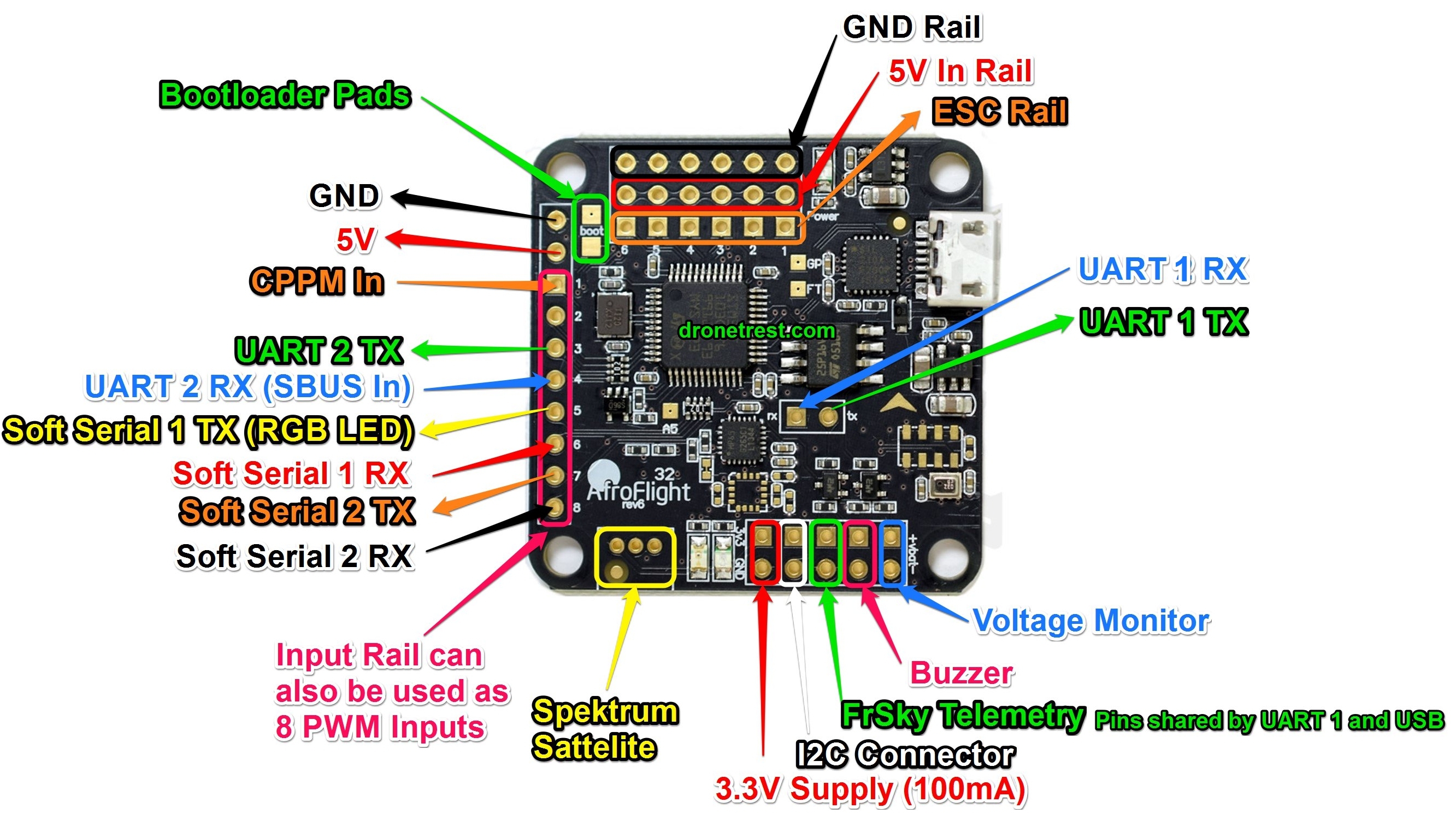
That is where I'd put it in however you should also be able to use an i2C connection between the FCB and arduino with a little modification to the source.
You might want to change the input from 4 potentiometers to pots that are controlled like an analog joystick, or replace them completely with a controller.
@Nick could give you more info on it as he has actually done almost exactly what you are asking about.
the receiver should plug in to the CPPM in and you might draw your power from the 5v+ and ground on the ESC's power bus.
That is where I'd put it in however you should also be able to use an i2C connection between the FCB and arduino with a little modification to the source.
You might want to change the input from 4 potentiometers to pots that are controlled like an analog joystick, or replace them completely with a controller.
@Nick could give you more info on it as he has actually done almost exactly what you are asking about.